
Новый проект Университета Мердока должен стать крупнейшим деревянным зданием массового строительства в Западной Австралии.
Крупные проекты строительства из массивной древесины требуют размещения сотен тысяч винтовых креплений. В рамках нового сотрудничества тяжелую работу выполняет робот.
В кампусе Университета Мердока в Перте возводится новое массивное деревянное здание (MET). Проект будет самым большим зданием MET в Западной Австралии, но не это привлекло внимание к строительной площадке однажды в мае прошлого года.
Причина телевизионных новостных камер, тщательных мер предосторожности, заинтересованных рабочих, обсуждающих, смогут ли они работать быстрее, чем новый сотрудник, восходит к разговору Пратика Шреста CPEng, инженера-строителя Aurecon, руководившего проектом, несколькими годами ранее.
«Мы выбрасывали случайные идеи и говорили: «Было бы круто, если бы на площадке были роботы?», — вспоминает Шреста.
Он признает, что это была «идея голубого неба», но Aurecon хотел увидеть, сможет ли она воплотиться в реальность.
«Одна из вещей, которую мы делаем в Aurecon, — это то, что у нас довольно хорошие отношения с другими университетами», — говорит Шреста. «Поэтому мы решили, что давайте проведем совместную работу, чтобы привлечь Сиднейский технологический университет [UTS] — мирового лидера в области робототехники — сотрудничать с Университетом Мердока и с нами, и давайте… посмотрим, к чему это приведет».
Конечным результатом стал пробный запуск специально разработанного робота, созданного для крепления шурупов на строительной площадке.
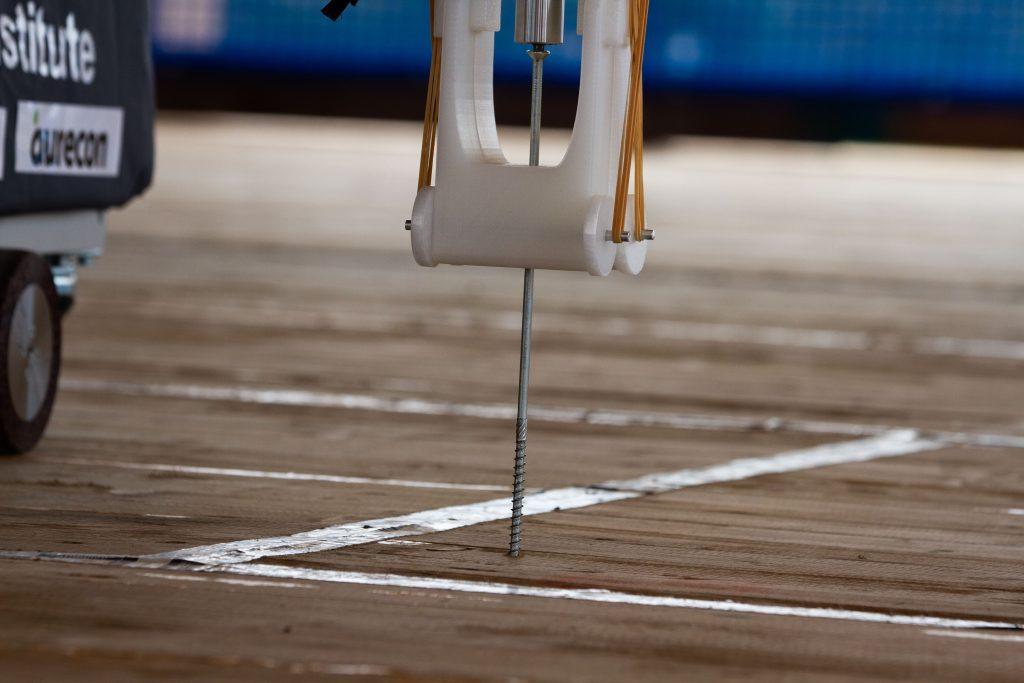
Для всего здания в Университете Мердока потребовалось бы от 200 000 до 300 000 шурупов, но в этот день роботу было поручено прикрепить от 50 до 100 из них, чтобы продемонстрировать, что он может выполнять эту работу.
«Все прошло очень гладко, — говорит Шреста. «Мы провели достаточное количество тестов в лабораторных условиях, поэтому, когда мы добрались до объекта, сбоев не было».
Задача идеальна для роботов: винты громоздки и многочисленны, а их вкручивание повторяется.
«Шурупы, которые мы устанавливаем, — это не просто шурупы Bunnings, которые вы покупаете для настила вашего дома», — поясняет Шреста. «Это винты длиной от 300 до 400 мм; они от кончика пальца до локтя». Тот факт, что проект Университета Мердока использовал МЕТ, сделал идеальной разработку робота, который мог бы взять на себя часть работы. Шреста сравнивает MET с «гигантским набором Ikea».
«Он очень сборный и, по сути, поставляется в плоской упаковке; Можем ли мы где-нибудь использовать робототехнику, чтобы собрать ее?» он говорит.
«Итак, мы работали с UTS над развитием этой идеи. Сама разработка специалиста по робототехнике — это все UTS, но мы были активно вовлечены в концептуализацию робота с точки зрения того, что он должен делать, как он должен работать».
«Это винты длиной от 300 до 400 мм; они от кончика пальца до локтя».
Пратик Шреста CPEng
Одна из проблем, которую обнаружила команда, заключалась в том, что роботы не реагируют инстинктивно на неожиданные силы, выводящие их из равновесия, как это сделал бы человек.
«У роботов на самом деле нет такой гироскопической способности балансировать себя, поэтому одной из самых больших проблем было то, что если винт был немного под углом, он продолжал бы двигаться под углом», — говорит Шреста. «Другая проблема, с которой мы столкнулись, была связана с крутящим моментом. В любой деревянной конструкции при сверлении необходимо изменять крутящий момент… потому что древесина имеет разную плотность. В древесине могут быть сучки. Итак, робот, если вы просто установили его на один крутящий момент, мы обнаружили, что винты продолжали изгибаться в неправильном положении».
Инженеры также должны были убедиться, что робот может безопасно перемещаться по строительной площадке, что включало использование лидара и информационного моделирования зданий (BIM), а также меры предосторожности, такие как ручное управление и функция автоматической остановки.
«Мы использовали нашу модель BIM для ввода данных в робота для создания цифрового двойника. Поэтому робот, прибыв на место, загрузил модель BIM и знал, где он находится в пространстве, а затем использовал столбцы — физические столбцы — для триангуляции своего местоположения», — говорит Шреста.
«Затем робот автоматически перемещается туда, куда ему нужно, а затем начинает сверлить крепежные винты с точностью менее 5 мм».
Чтобы убедиться, что функция навигации работает, нужно подумать о практических возможностях работы на реальной строительной площадке, а не в контролируемой лабораторной среде. «Строительная площадка никогда не стоит на месте, — говорит Шреста.
«Есть люди, есть мобильные платформы, есть свет, который отражается на роботе. Поэтому получение достаточно надежной навигационной системы было одной из самых больших проблем на раннем этапе, и с UTS мы провели множество виртуальных симуляций с использованием цифрового двойника, чтобы иметь возможность сказать: «Хорошо, мы можем полностью полагаться на навигационную систему».


